Kauplus: Villardi 22, Tallinn +372 5835 1267


Mina, blogipostituse kirjutaja, olen Mart Rae ja toimetan insenerina omaenda ettevõttes Rae Geodeesia OÜ. Enam kui kakskümmend tööaastat olen olnud ehitusega seotud ja kui mitte kogu aeg platsil mõõdistanud, siis hinges ikkagi alati olnud geodeet. Esimesed 14a töötasin Nordeconi kontsernis alustades abigeodeedi kohal ja lõpetades peageodeedina. Vahepeal tuli põgus kõrvalepõige geodeesiaettevõtte tegevjuhiks, aga viimased viis aastat olen toimetanud geodeedina omaenda ettevõttes. Märksõnad nagu mõõdistamine, projekteerimine, 3d mudelid, masinjuhtimine, BIM jmt kuuluvad mu igapäevatöö juurde ja selle kõige käigus olen jõudnud olukorda, kus droonidega toimetamine on mu tööelu ja kohati isegi vaba aja lahutamatu osa.
Rae Geodeesias teostame, nagu nimigi viitab, erinevaid geodeetilisi töid – alates ehitusmärkimistest, teostusmõõdistustest, mahtude arvutamisest kuni suurte alade kaardistamisteni. Huvitaval kombel on välja kujunenud, et pea pool meie käibest moodustavad mehitamata õhusõidukite abil teostatud tööd ja nende abil kogutud andmete analüüs ja töötlemine.
Parafraseerides Agu Sihvkat, siis selleks, et kõik ausalt ära rääkida, pean ma alustama algusest ja püüan teha väikese sissejuhatuse mõõdistusmaailma üldiselt.
Kui tavapäraste mõõdistuste peamisteks töövahenditeks on RTK GNSS vastuvõtjad (maakeeli gepsud), elektrontahhümeetrid, või kasvõi mõõdulint, siis järjest enam kasutatakse mõõdistamiseks ka laserskännereid, mehitamata õhusõidukeid või muid kaugseire võimalusi. Rae Geodeesias on välja kujunenud, et enamus droonidega tehtud töid kasutavad fotogramm-meetriat tulemuse saamiseks.
Kui püüan võimalikult lihtsalt nende erinevate mõõdistuste erisusi selgitada, siis nö. tavapärane mõõdistus (e. kontaktmõõdistus) tähendab, et keegi peab konkreetse mõõdistatava punkti peale jalutama, sellele osutama või välja otsima. See tähendab, et ükskõik, mida mõõta vaja on, seda on vaja otse näha, ning vajadusel sinna ligi pääseda. Ligipääs võib teinekord olla üsna keeruline.




Joonis 1, 2, 3, 4. Keeruline ligipääs kontaktmõõdistusel
Viimane omakorda tähendab, et mõningate tööde teostamine on ohtlik ja selle läbiviimiseks on vaja kasutada erivahendeid, ning rakendada täiendavaid meetmeid ohutuse tagamiseks. Näiteks tuleb leida või paigaldada kinnituskohad turvarakmete kinnitamiseks, rentida tõstukeid, redeleid jmt. See teeb tööde läbiviimise aeganõudvamaks ja kulukamaks, eriti olukorras, kus ehitusplatsil on ka mitmeid muid masinaid ja inimesi liikumas.

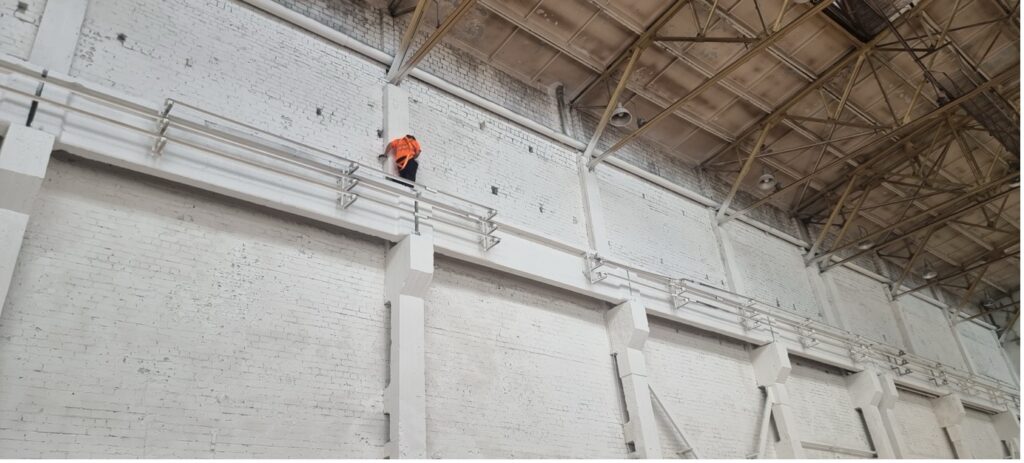


Joonis 5, 6, 7, 8. Ohtlikus ning erivahendite kasutamine
Muud meetodid nagu laserskaneerimine, fotogramm-meetria, LiDARiga mõõdistus või sonar võimaldavad teha mõõdistusi kaugemalt ilma tingimata mõõdetava punkti juures käimata ja hankida korraga suure hulga kvaliteetseid andmeid. Seda tüüpi lahendused võivad olla tavapärase statiivi peal kui ka autode, paatide, raske ehitustehnika, rongide või muude liikuvate masinate peal ja loomulikult ka (mehitamata) õhusõidukite külge installeerituna. Olgu nendeks siis multirootorid, lennukid, helikopterid, või minu poolest kasvõi kuumaõhupallid. See kõik võimaldab teha tööd kiiremini, ohutumalt ja vähemate ressurssidega. Selle postituse teema on siiski mehitamata õhusõidukitelt tehtavad tööd, seega kirjutan neist veidi rohkem. Üks enamlevinud viis andmete kogumiseks on fotogramm-meetria, mis on ka meie igapäevatöö osa.
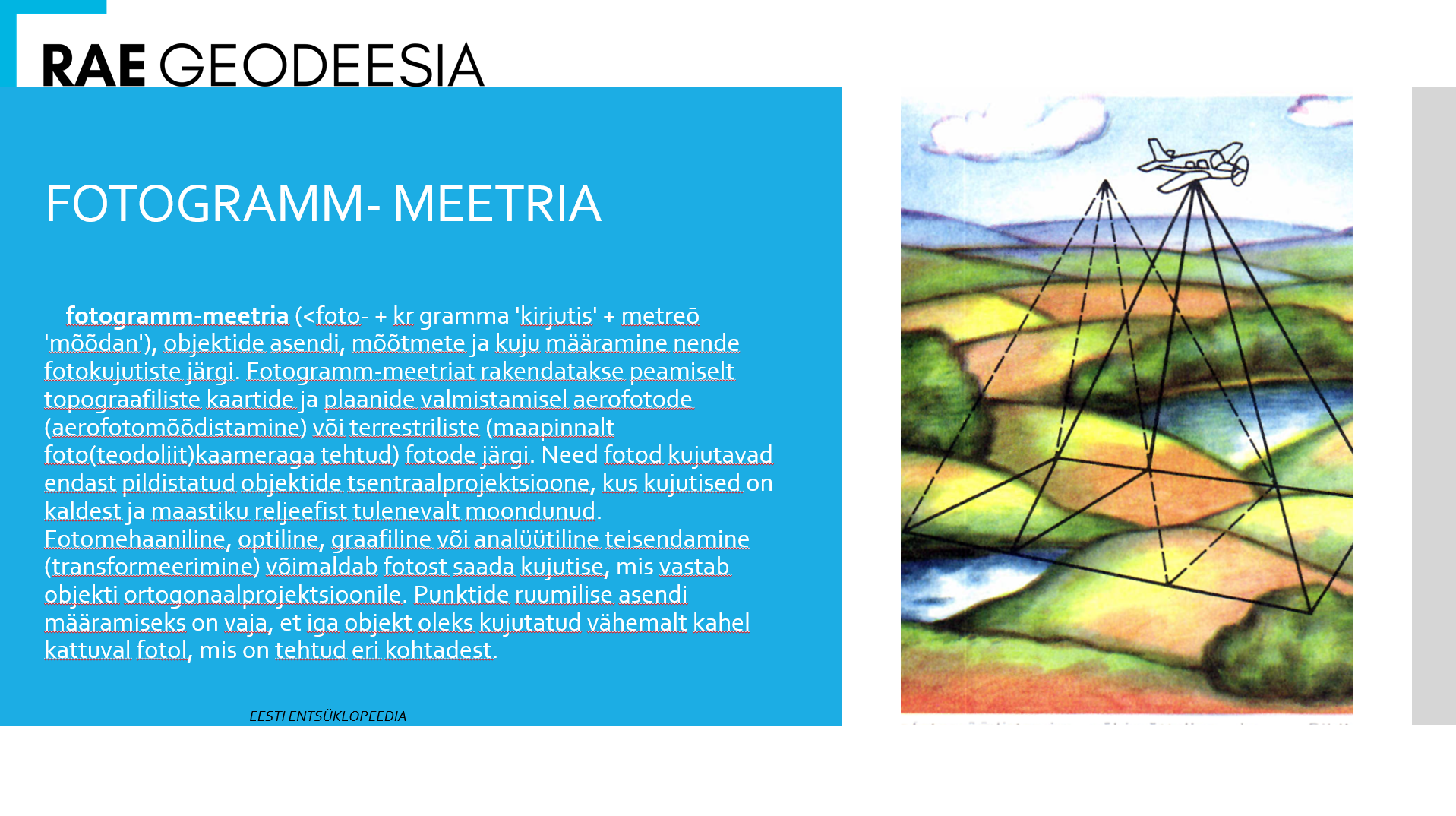
Joonis 9. Fotogram-meetria definitsioon Eesti Entsüklopeediast
Tihti ootavad praktikandid kõige enam, et saaks näha mismoodi fotogramm-meetria tarvis drooniga välitöö välja näeb, ning kui näevad on selles pettunud, sest see, mis toimub lendamise ajal on kõike muud, kui midagi põnevat – lihtsalt üks täpp taevas, mis liigub automaatselt edasi tagasi. Tegelikkuses on kõige olulisemad osad need, mis eelnevad lendu tõusule. Alates kõikide vajalike kooskõlastuste ja lubade hankimisest, lõpetades konkreetse lennu planeerimisega. Fotogramm-meetrilise mõõdistuse tarvis tuleb sõltuvalt töö eesmärgist paika panna lendamise plaan, kus on eelnevalt seadistatud lennu trajektoor, kaamera nurk, fotode ülekatted jpm. Meie kasutatav lennupark (DJI M300 RTK+DJI P1 täiskaader kaamera või varasemast DJI Phantom 4 RTK-d) on viinud nende tööde tegemise võrdlemisi lihtsaks ja kergesti planeeritavaks.
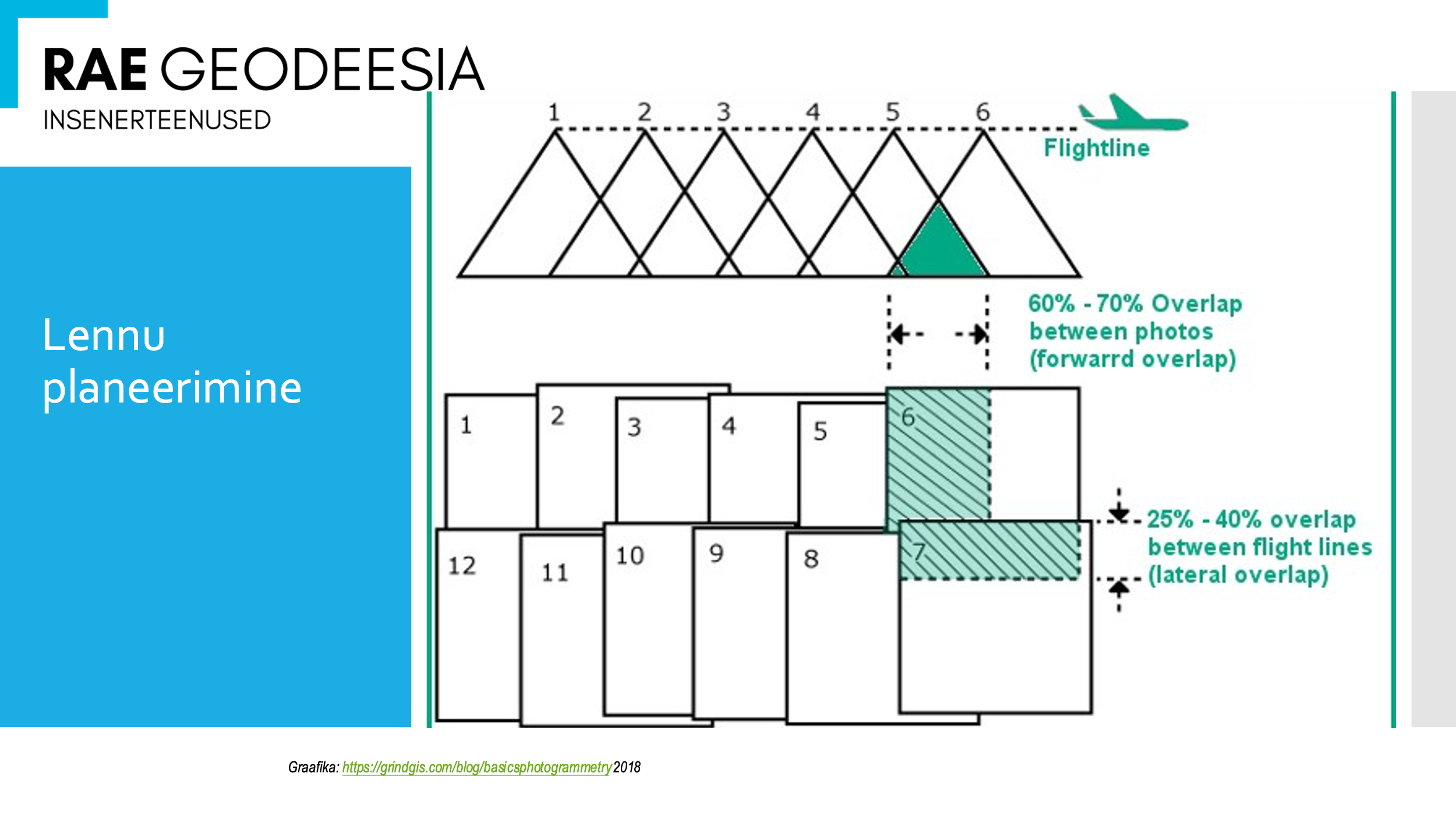
Joonis 10. lennu planeerimine
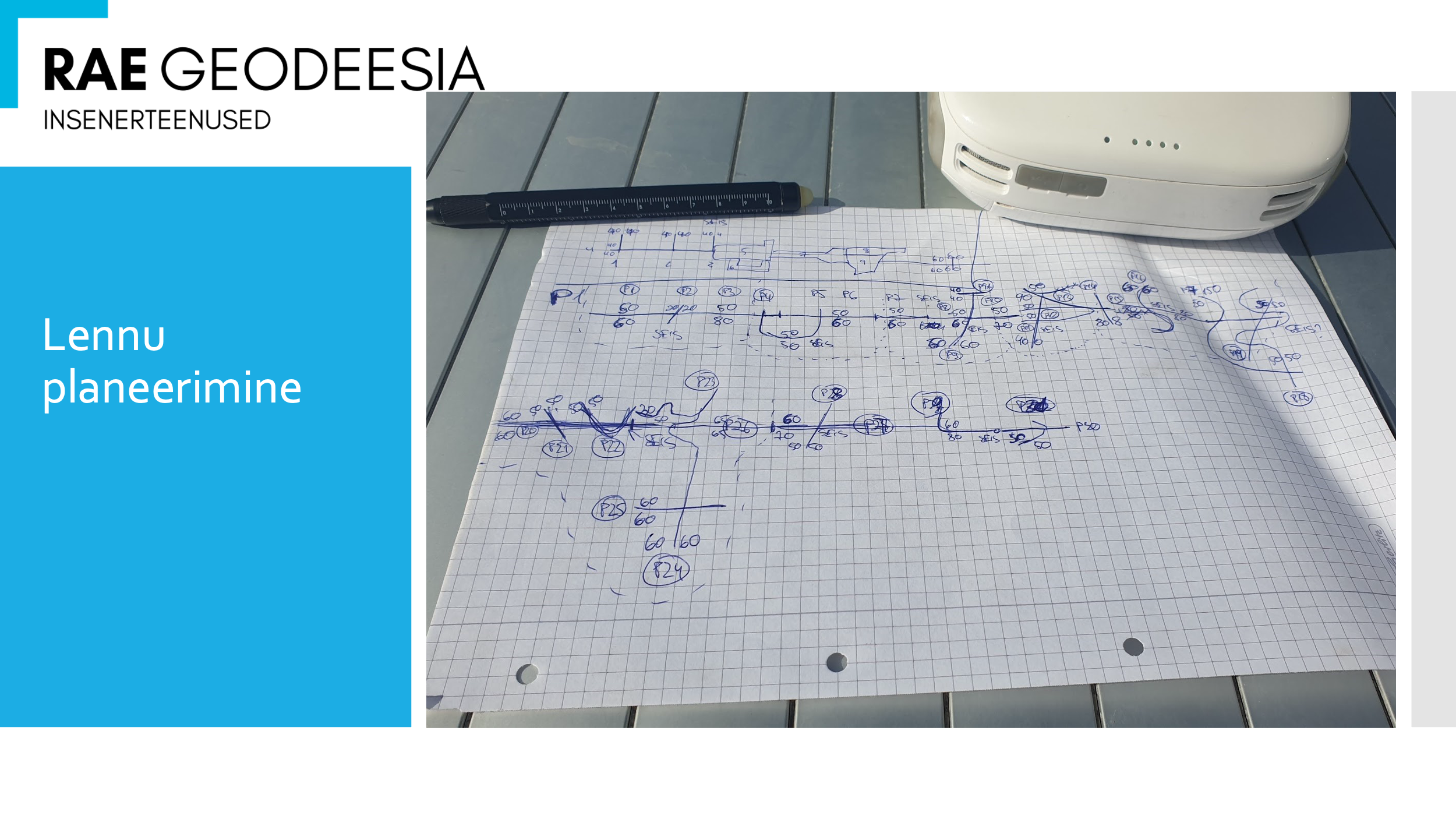
Joonis 11. lennuplaan
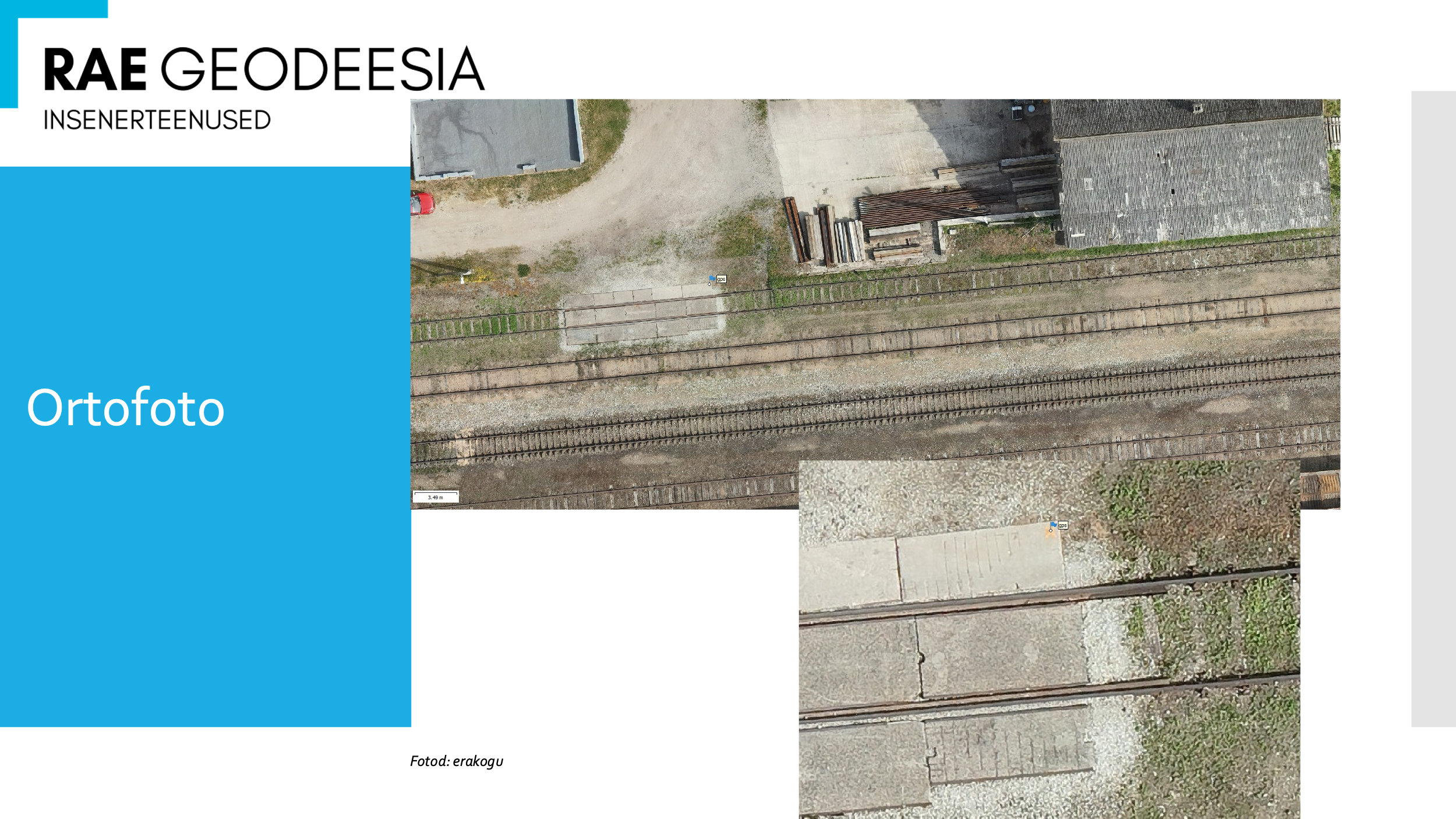
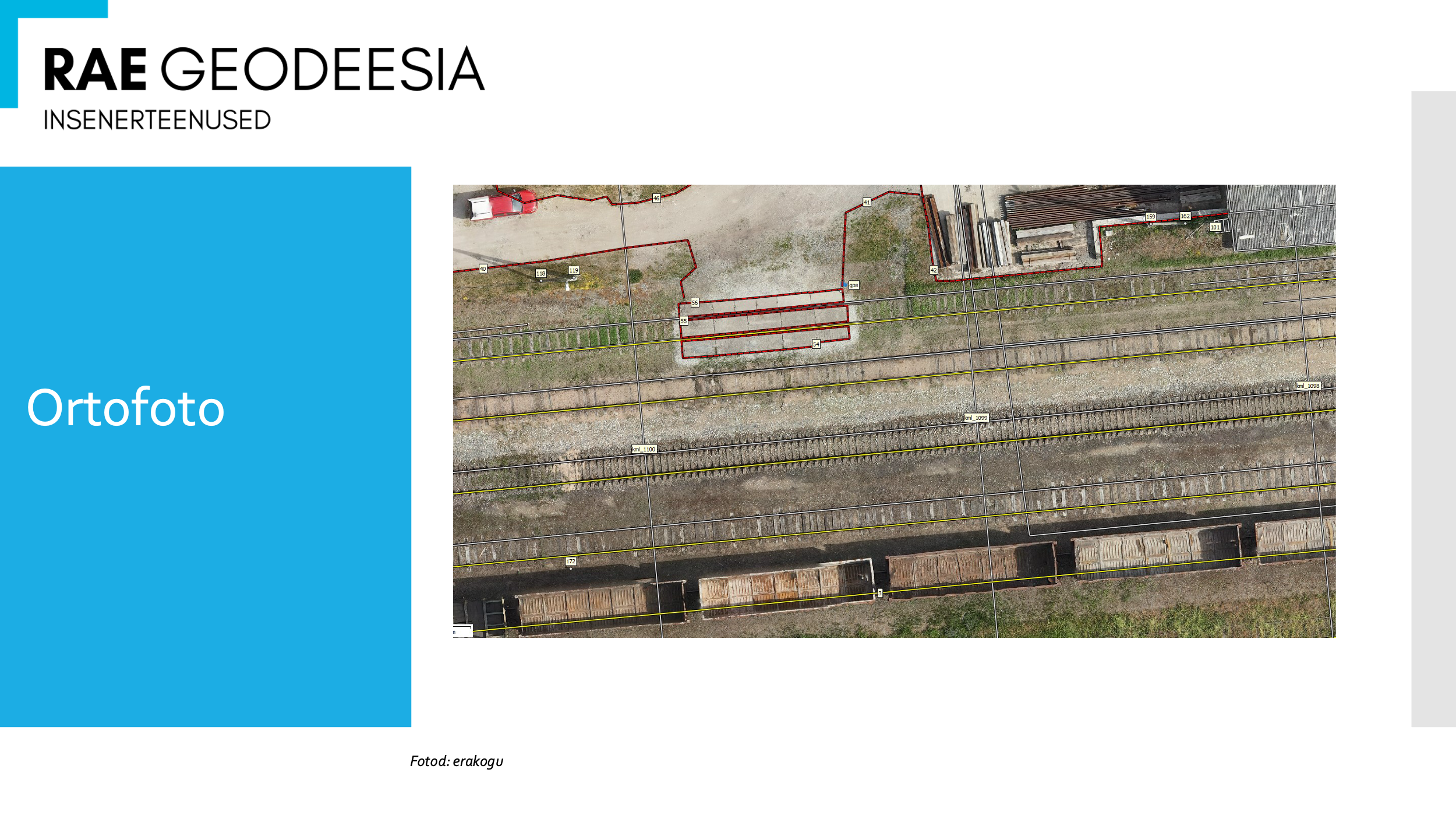
Kui planeeritud lennud on tehtud, siis eduka tööpäeva lõpuks on meil tulemuseks ca. 500GB või rohkem fotosid (st. teinekord 20 000+ fotot), mida asume spetsiaalses tööjaamas töötlema. Tehes ära töötlemise protsessi, saame töö tulemuseks punktipilve, reljeefivarjutuse pildi, ortofoto, 3D-mudeli või muu sellise väljundi. Nende tulemuste abil saame koostada teostusjooniseid, arvutada tööde mahte, koostada projekte, analüüsida taimestikku ja teha veel paljut, mida klient esimese hooga ei tea soovida. Sellise tööprotsessi tulemusi võid näha näiteks Eesti Maaameti ja Google Mapsi kaardirakendusi kasutades.
Joonis 12. ortofoto
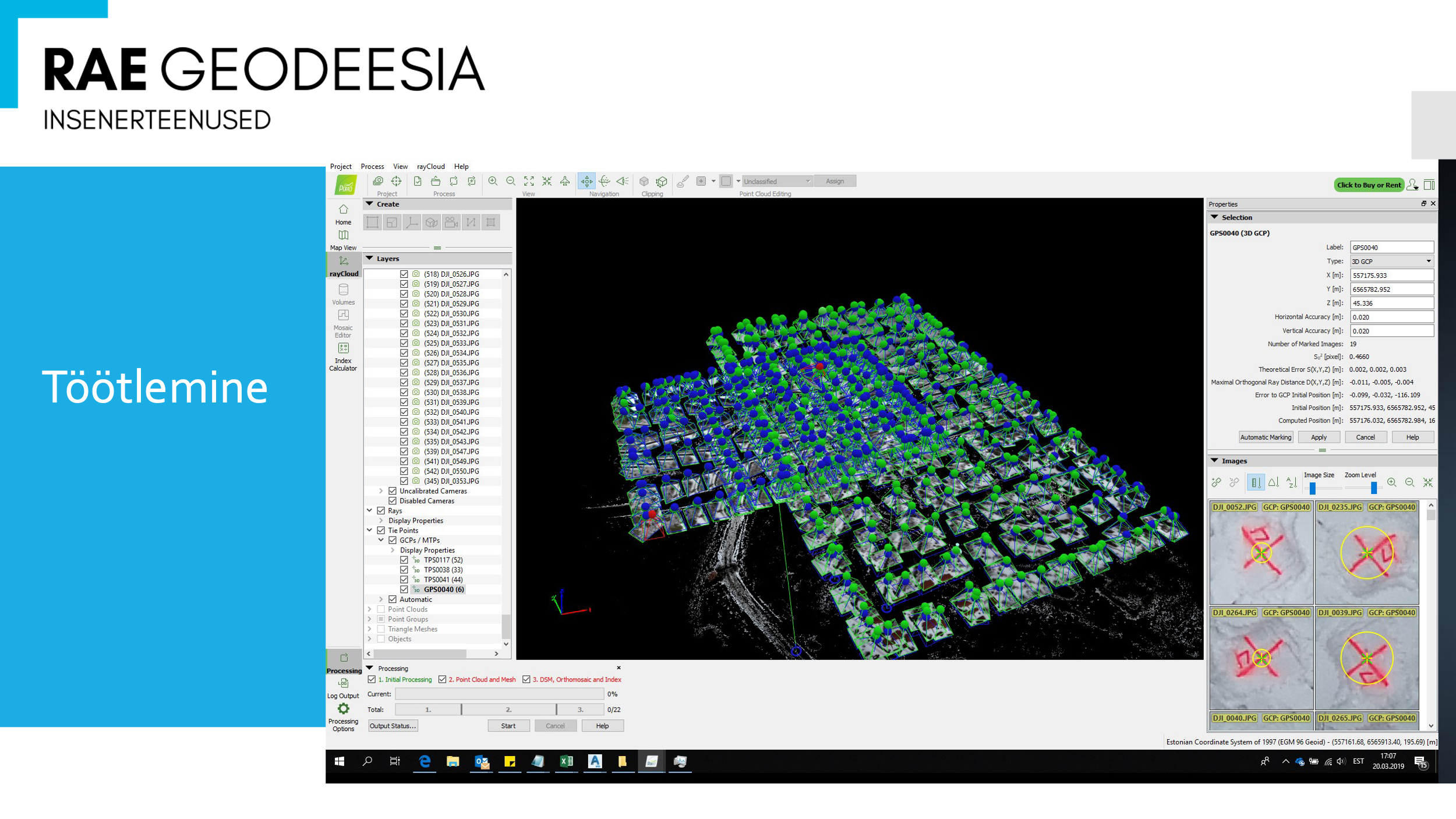
Joonis 13. töötlemine
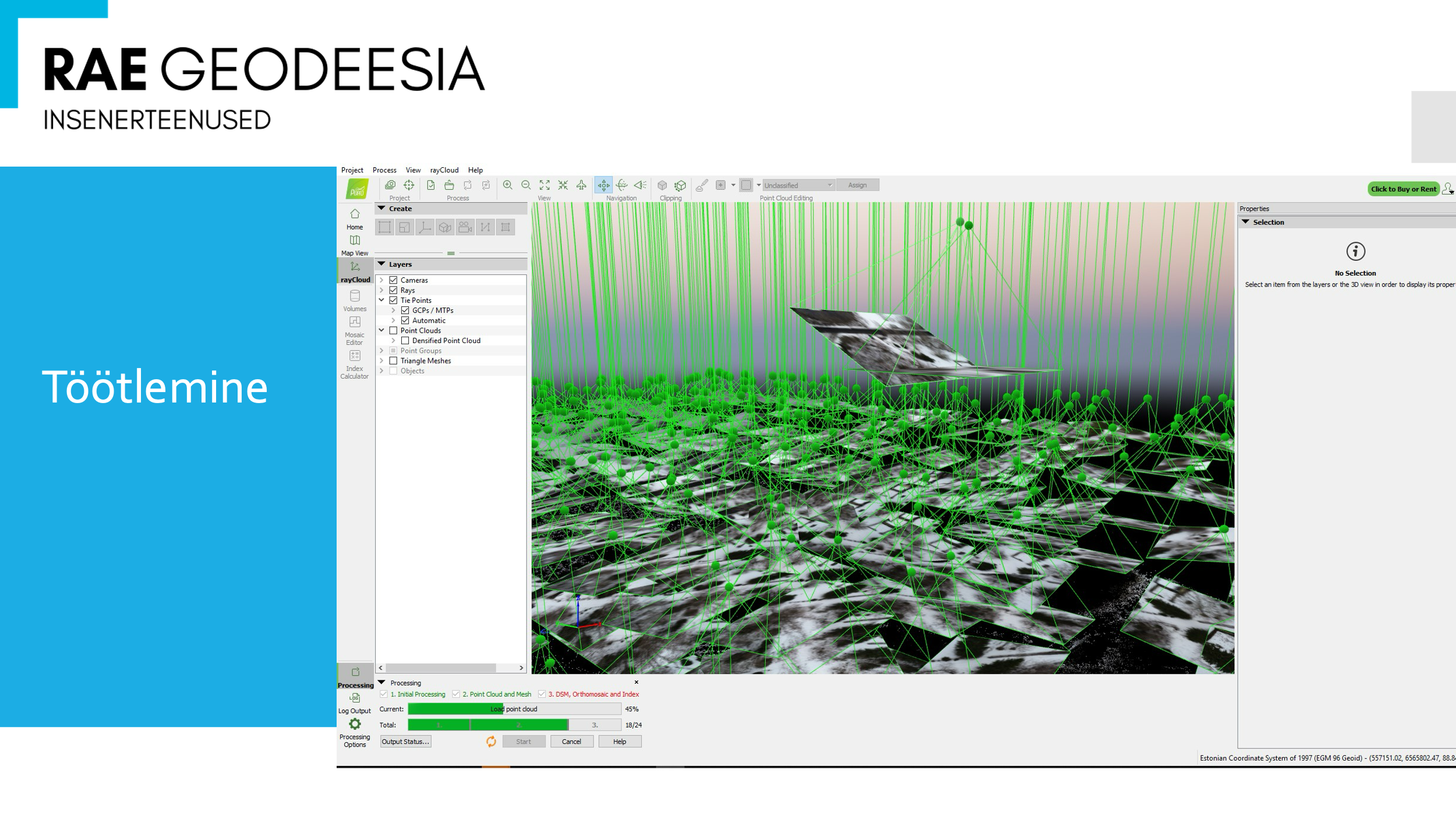
Joonis 14. töötlemine
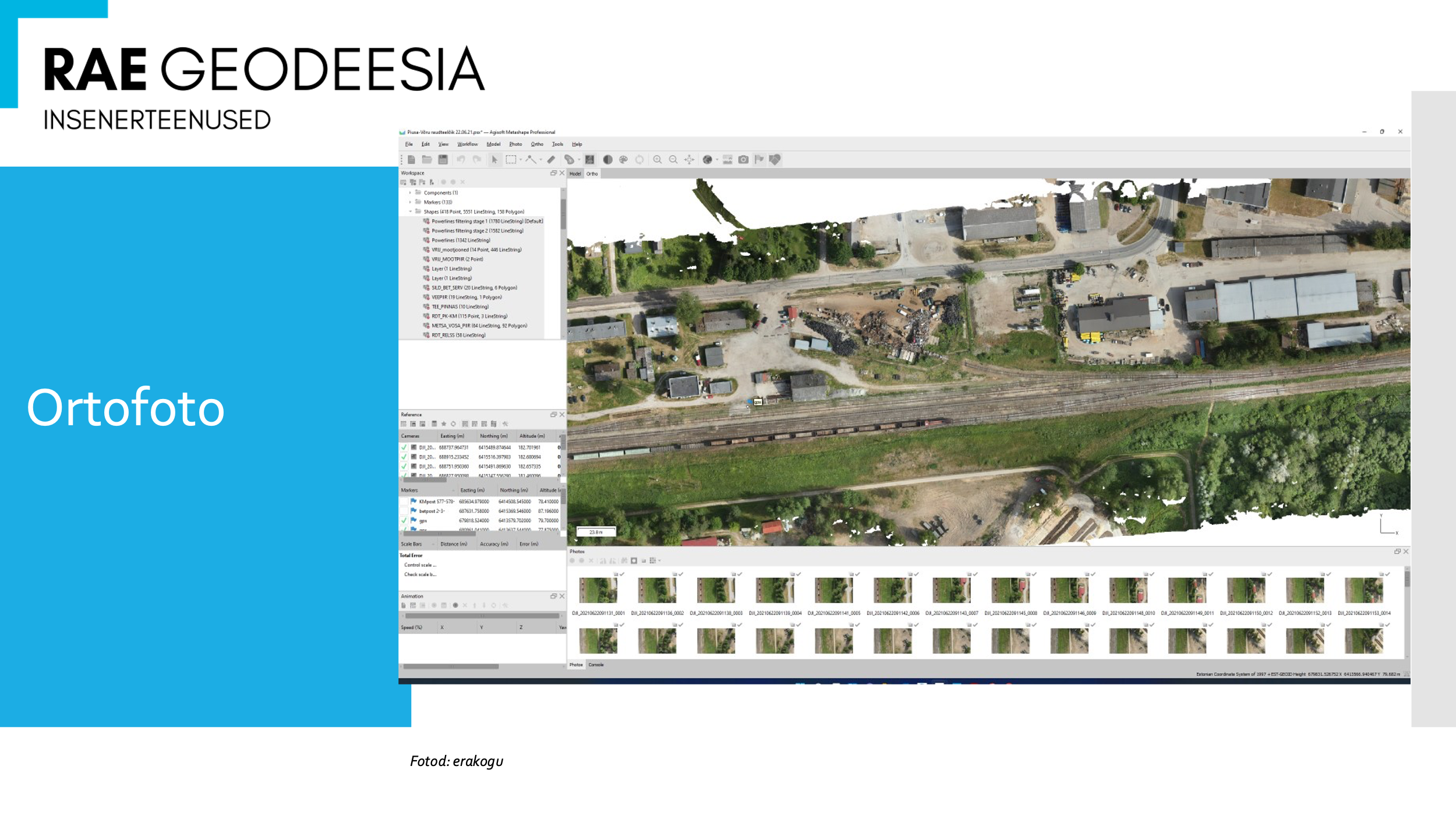
Joonis 15. ortofoto
Joonis 16. ortofoto
Joonis 17. ortofoto
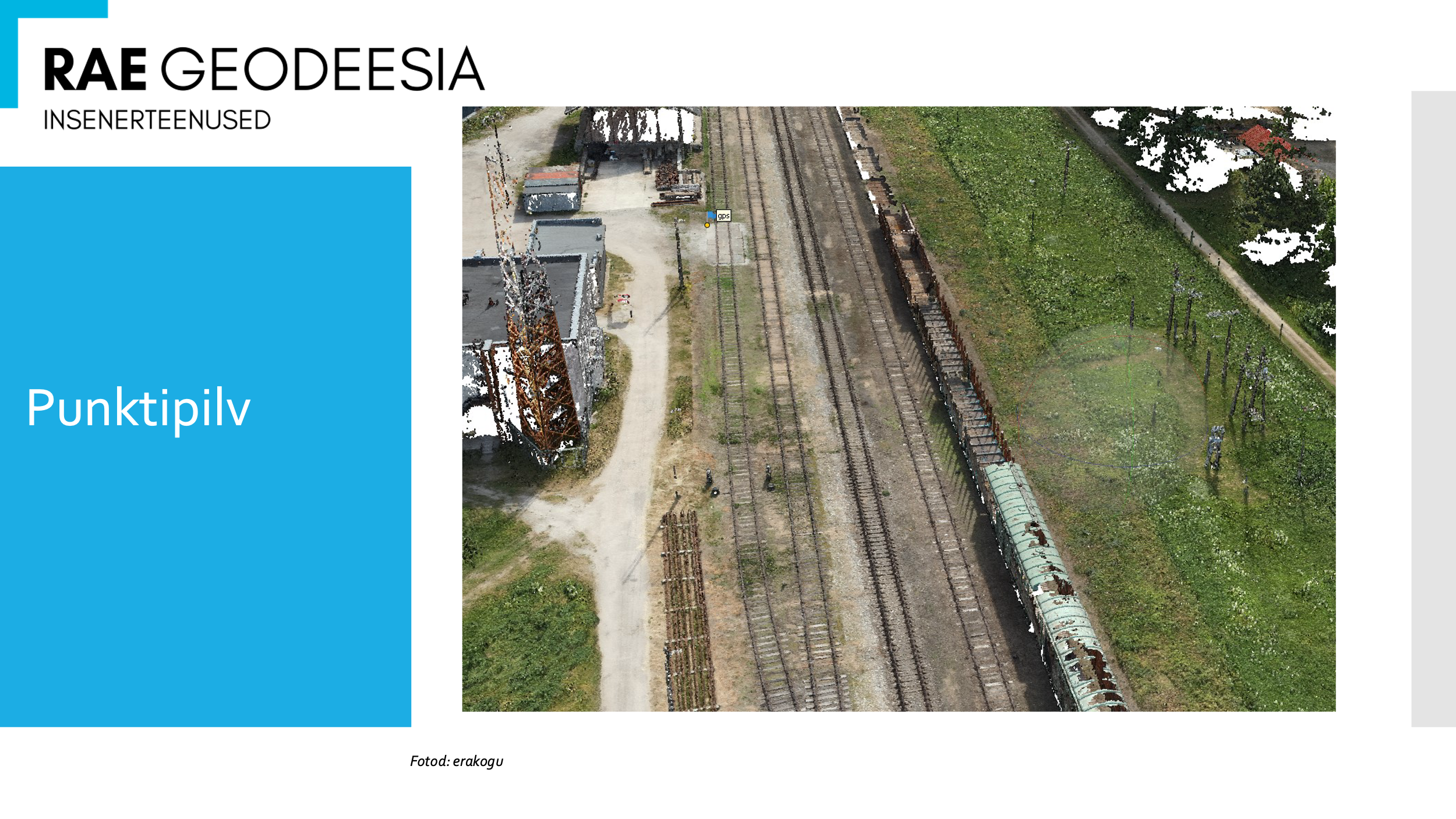
Joonis 18. punktipilv

Joonis 19. punktipilv
Fotogrammmeetriline töövoog võimaldab meil võrdlemisi kiirelt mõõdistada üsna suure täpsusega suuri alasid. Kui töö korrektselt teostada, on tulemuste täpsus asukohas mõni sentimeeter. Aga on olukordi, kus LiDARi kasutamisel on eelised.
- LiDARi töö põhineb tagasipeegeldunud laserimpulsilt kolmemõõtmeliste koordinaatide arvutamisel. Skaneerida võib nii õhusõidukilt (aerolaserskaneerimine) kui ka maapinnalt. LiDAR saadab välja valgusimpulsi, mis sihtkohta jõudes peegeldub tagasi seadmesse. Kuna laserskaneerimine toimib valguse kiirusel, mis on ligikaudu 0,3 m/ns, on võimalik arvutada valguskiire levimise teekonna pikkus seadmest pinnani, millelt valguskiir tagasi peegeldub.
- Üheks LiDARi levinud rakenduseks on detailsete kaartide ja pinnamudelite koostamine, mida kasutatakse geograafias, geoloogias, geodeesias, geomorfoloogias, aga ka atmosfäärifüüsikas, metsanduses, põllumajanduses ja keskkonnauuringutes. Sel juhul on tegemist maapinna kaugseireviisiga.[1]
Joonis 20. Lidar https://et.wikipedia.org/wiki/Lidar
LiDARi kasutamisel saame samuti tulemuseks punktipilve, kõrgusmudeli ja teatud tingimustel ka ortofoto, aga LiDARi eelised tulevad välja siis, kui Fotogramm-meetria abil oleks töö teostamine keeruline, või annaks puuduliku tulemuse. Näiteks, kui peame mõõdistust tegema selliselt, et mõõdistatav pind pole selgelt silmaga eristatav – maapind on puude, heina või põõsatse all peidus.

Joonis 21. kõrge hein.
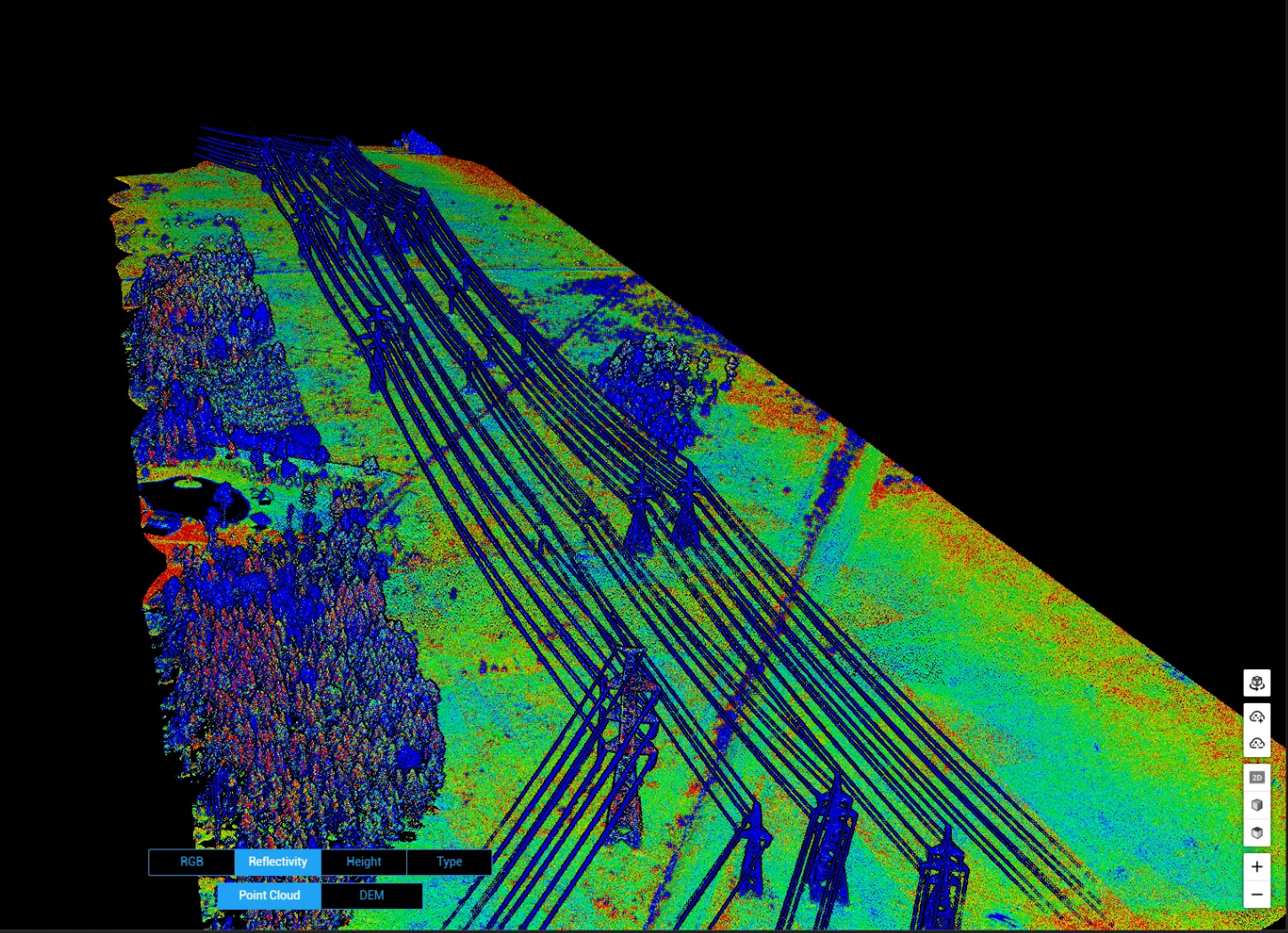
Sellisel juhul on LiDARi plussiks, et mõni laserkiirtest jõuab läbi rohu maapinnani ja saame erinevaid algoritme kasutades andmeid ka maapinna kohta. Samuti, kui meil on vaja mõõta midagi kõrgel õhus, nagu 330kv õhuliinid, siis on üsna kindel, et lendu korrektselt teostades läheb mõni laserkiir ka õhuliini pihta ja saame selle paiknemise kohta täpsed andmed kätte.

Joonis 22. elektriliinid
Joonis 23. elektriliinid
LiDARi esimeseks suuremaks miinuseks võib lugeda tema võrdlemisi kõrget hinda ja, võrreldes fotogramm-meetriaga, madalamat täpsus – eriti, kui LiDAR pakendada suurusesse, mida on võimalik kasutada mehitamata õhusõidukitega. Õnneks tuli mõnda aega tagasi turule üks esimesi piisavalt soodne ja samas vajalikku täpsust tagav LiDAR, DJI L1. Etteruttavalt neile, kes hüüavad “Yellowscan, Velodyne või teised?”, vastaks oma subjektiivse hinnanguga, et DJI L1 hinna ja kvaliteedi suhe oli ikka oluliselt parem.

Joonis 24. DJI M300 RTK + DJI L1
DJI L1ga teostasime näiteks 90km kõrgepingeliini teostusmõõdistuse Tartust-Valgasse. Esialgu oli L1 kasutamine planeeritud katsetusena, aga kui tulemused näitasid, et saame andmeid usaldada, siis mõõdistasime terve lõigu. Mõõdistamisel olid omad mured, millega esimese hooga ei osanud arvestada. Näiteks kevad-talvisel ajal kulus LiDARi soojenemisele hirmus pikk aeg. Aeg-ajalt tekkis olukord, kus mõned andmed ei salvestunud, ning lõik tuli üle lennata. Kalibreerimine tuli teostada iga 100 lennusekundi järel jpm. Samuti võis pika kitsa sirge koridori lendamisel ilma kontrollpunkte sisestamata juhtuda, et liini ots läks näiteks 15m asukohast mööda, kui seda kontrollpunktidega võrrelda. Nagu tihti sellistel juhtudel on, võib mure olla tihendis puldi taga, vahel aga selles, et polnud rakendatud kõiki vajalikke meetmeid töö edukaks läbiviimiseks. Kui nüüd keegi küsib, et mis need meetodid on, siis selle teadasaamiseks tuleb tulla mõnele mu loengule – kõiki saladusi ja nippe ei saa ju niisama reeta. Tegemist oli igatahes ägeda tööriistaga, kuid mitte veel sellisega, mida oleks ummisjalu ostma tormanud.
Seetõttu oli mul hea meel olla oktoobris Berliinis, Intergeo messil, kui DJI tutvustas uut LiDARit, DJI L2. Uus LiDAR tekitas messil põnevust ja DJI ala ümber kogunes rahvamass, mis ummistas ligipääsu ka paljude teiste boksideni ja tänapäevale omaselt üles sirutatud kätel telefonidega filmides püüti kõike kuskile üle kanda. Minugi kõrval oli keegi, kes tegi samasugust live blogi iga esitluse lause kohta, nagu meil kohata võib siis, kui Jüri Ratas parteid vahetab. Ei osanud mõõdistusvahendeid nii põnevateks pidadagi. Seda suurem oli mu rõõm, kui Eduard Droon.ee-st helistas ja teatas, et esimene L2 peaks kohe-kohe Eestisse jõudma ja kas ma tahaksin seda testida. Samahästi võiks lapselt küsida, et ega sa kommi ei taha. Vastus on ikka sama. Loomulikult tahan. Ja nii oligi, et peale siiamaale jõudmist oli L2 mõned nädalad minu käes, kus katsetasin ja võrdlesin seda nii eelkäija DJI L1-ga, kui ka oma tavapärase DJI P1-ga tehtava fotogramm-meetriaga.
Mis on L2 LiDARis uut
DJI L2 ei vaja sellist IMU soojenemise aega, mis oli L1-l. Kohati võttis see L1ga isegi 10-12 minutit. Suurem sensor, parem täpsus ja kaugus laseril, rohkem registreeritavaid tagasipeegeldusi jpm.
Droon.ee jagas hea meelega tehniliste andmete võrdlust, millele ma ka siin viitan:
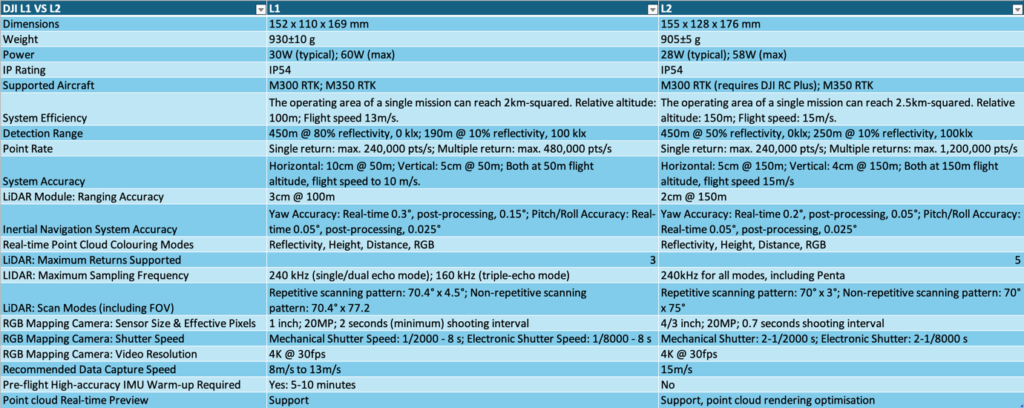
Joonis 25. DJI L2 vs L1

Joonis 26. DJI M300 + P1 ja DJI M350 + L2

Joonis 27. DJI M300 + P1 ja DJI M350 + L2
Enda katsetuste osana püüdsin kaasata L2te nii palju „päris“ tegevustesse kui võimalik. Ühe töö tulemusena peaks kevadel Maaülikoolis kaitsemisele jõudma elektriliinide mõõdistamise täpsust analüüsiv lõputöö, kus võrreldakse tahhümeetriga teostatavat mõõdistust, fotogramm-meetriat, ning L2 lidariga tehtud mõõdistust. Kel huvi hoidke silm peal.
Teine üks minu jaoks huvitavamaid töid oli see, kus mul oli tarvis võrdlemisi piiratud aja jooksul mõõdistada natukene vähem, kui 10km2 ehk 1000 hektarit maa-ala. Selle mõõdistuse käigus tulid LiDARi eelised fotogramm-meetria ees välja eriti hästi. Sel ajal kui LiDARiga droon oma töö lõpetas oli kaameraga droon alles lähenemas poolele mahule. Töö lähteülesannet arvestades samas tagas LiDARr piisava täpsuse ja andmed, mis antud ülesande jaoks olulised olid. Samuti tuleb selle töö näitel kenasti välja, et üks LiDARi kasutamise eeliseid on järeltöötlusele kuluv lühem aeg (just selle osa, kus arvuti ragistab ja ise midagi sel ajal teha ei saa).
Antud töö näitel kulus L2-ga droonil lendamise peale 2h 39min ja punktipilve töötlemisele 2h 35min. P1 kaameraga drooni puhul oli lendamise aeg ca 7h, ning töötluse peale kulus natukene alla 100h.
Kui kellelgi tekkis küsimus, et miks ma just IMU soojenemise teemale tähelepanu juhin, siis selle töö näitel oleks vanema L1 LiDARiga IMU soojenemise aeg olnud täiendavad 2 tundi. Seega peaaegu sama kaua kui muu lendamine ise.
Loomulikult töö tulemus oli ka erinev (fotogramm-meetria ortofoto detailsus oli selline, et kergesti eristatavad olid 2cm suurused elemendid), kuid antud ülesande puhul tegelikult oleks piisanud ka LiDARiga tehtud tööst.
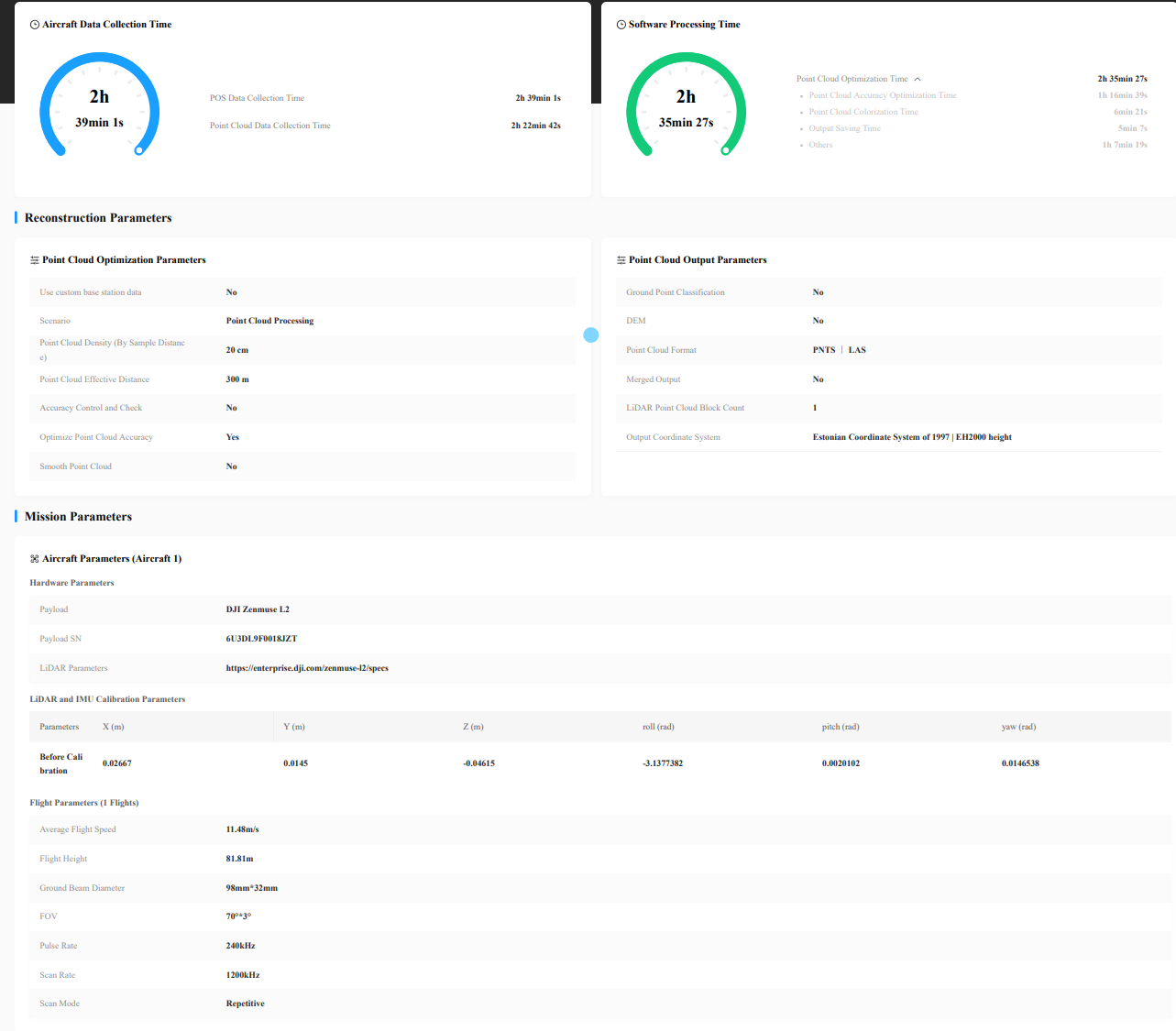
Joonis 28. Väljavõtted töötlemise aruandest
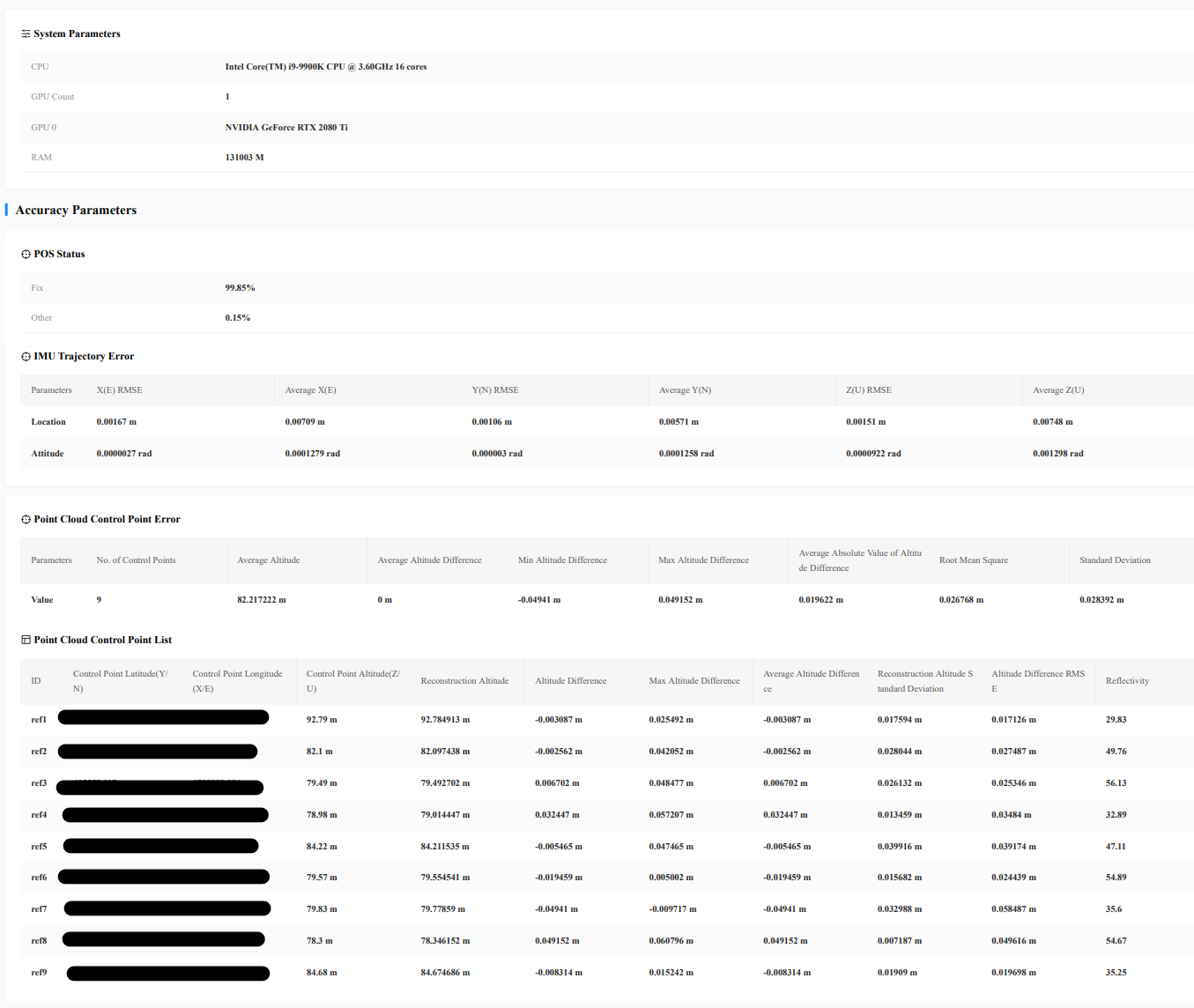
Joonis 29. Väljavõtted töötlemise aruandest
Nagu ülaltoodud aruandest näha, on kontrollpunktide kasutamisel punktipilve tegelik täpsus isegi oluliselt parem, kui tootja ise välja käib. Samuti oli puht silmaga vaadetes palju parem ka punktipilve kvaliteet. Pilve jäid paremini objektid, mis muidu jäävad puude okste varju, kui ka need, mis olid millegi taga, õhus, või muidu raskesti tuvastatavad. Näiteks leidsin punktipilvest madalpinge postide tõmmitsad, mida geodeet polnud tähele pannud.
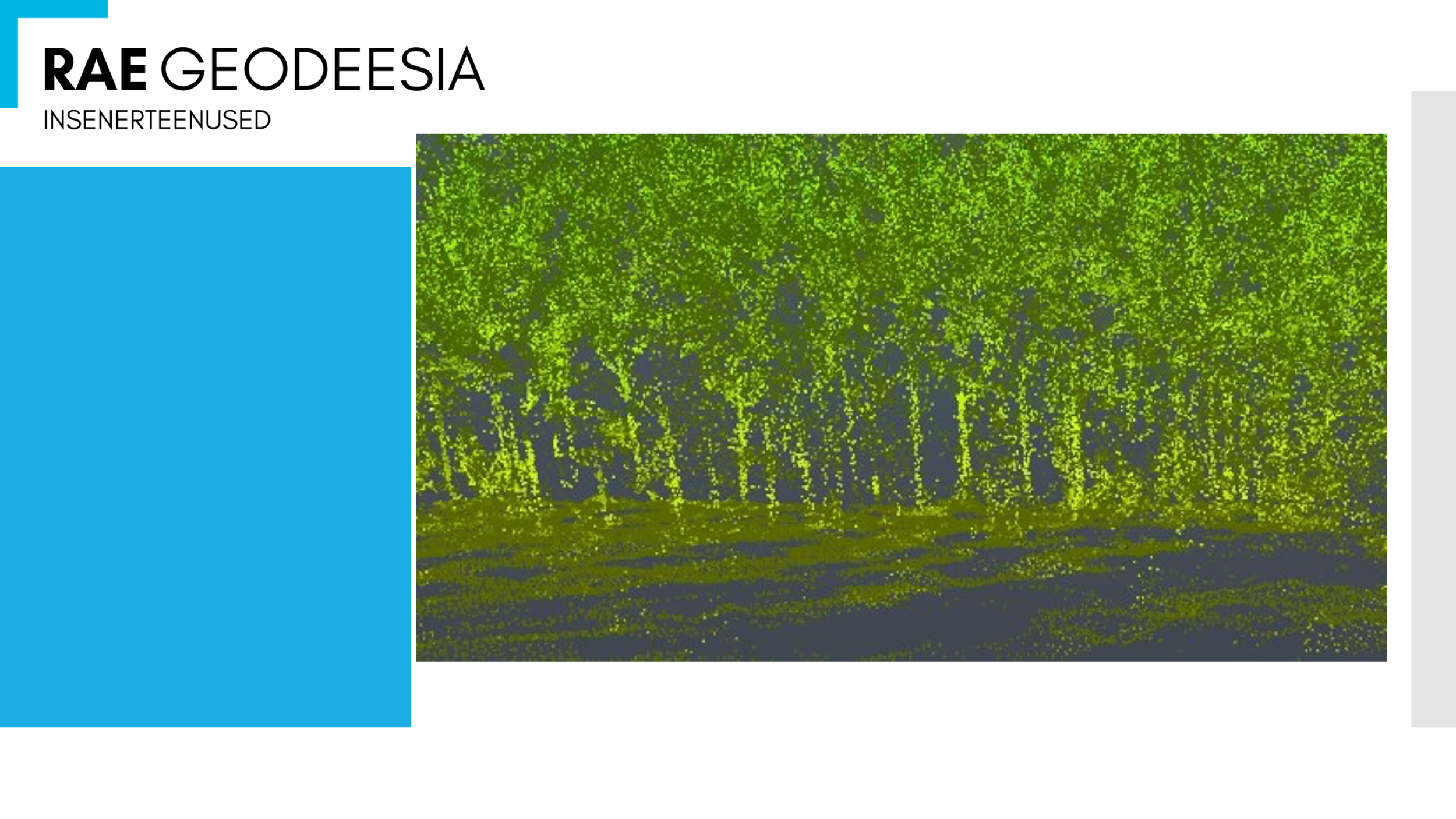
Joonis 30. Punktipilve vaade metsast
Esmamulje selle põgusa katsetuse tulemusel on äärmiselt positiivne ning püüan talvel leida aega natukene tõsisemat analüüsi ette võtta. Kindlalt võib väita, et töö kiirus, andmete kvaliteet ja kasutusmugavus on teinud olulise hüppe edasi võrreldes varasemaga ja tegemist on väga hea tootega, mille hinna ja kvaliteedi suhe on hästi paigas.
Kellele teema huvi pakub, siis soovitan alla laadida DJI ja BAAM.Tech poolt ühiselt koostatud põhjalik analüüs „DJI ZENMUSE L2 ACCURACY ANALYSIS AND USE CASE EXPLORATION“ kus minnakse teemasse oluliselt rohkem sisse, kui seda oleks kohane teha ühes blogipostituses.
Kui sul on DJI L2 lidari ja selle kasutamise osas küsimusi siis võtke julgelt ühendust nii minu kui ka droon.ee meeskonnaga.